激光雷达
提醒
如下设备测试是在ROS2环境上做验证,请参考 工具安装 章节文档将所有ROS相关工具安装上。
Laser LDS-50C-E
准备
- 犀牛派A1
- Laser LDS-50C-E蓝海激光雷达
- 雷达所用的12V电源
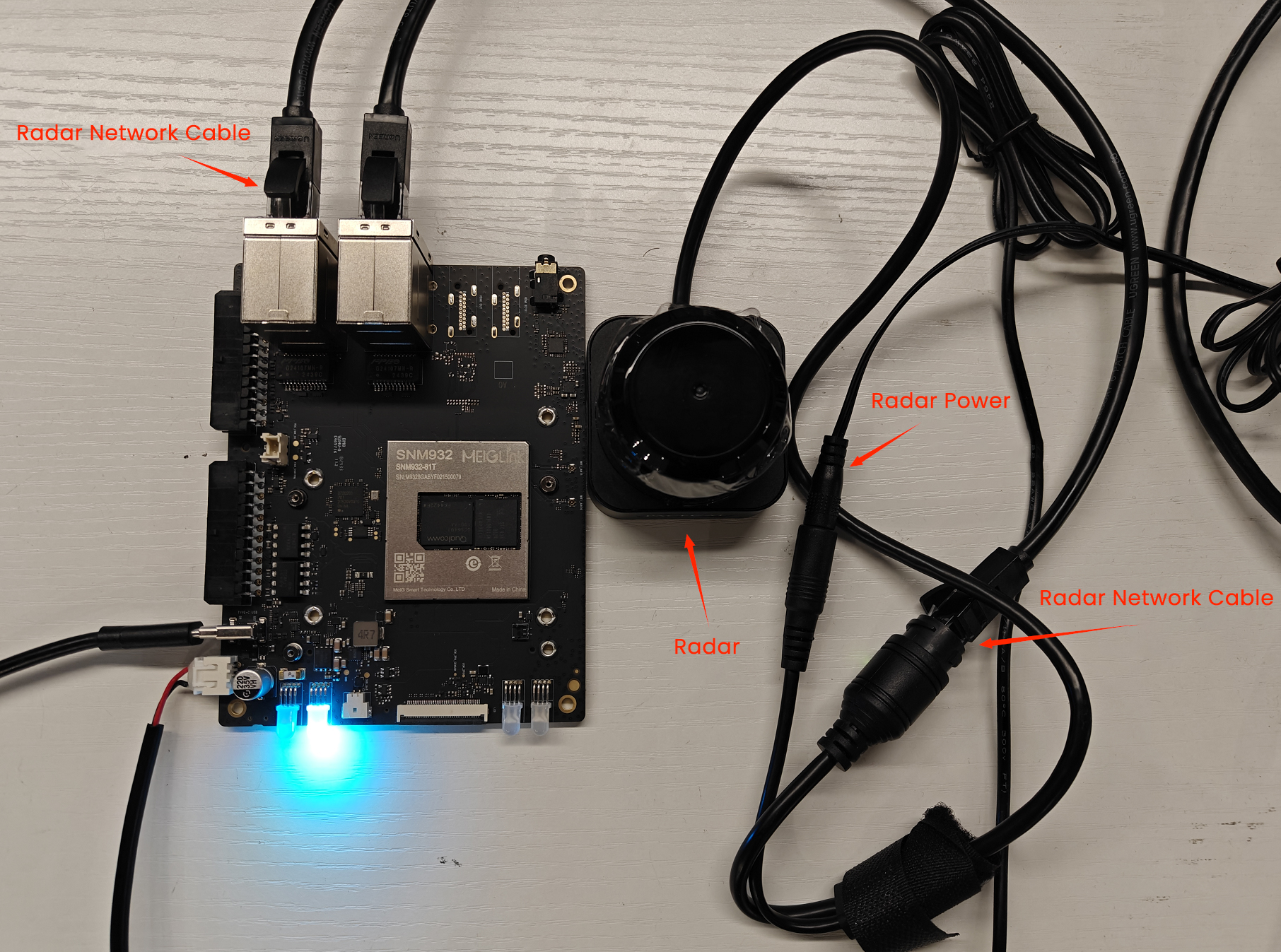
硬件连接及网络配置
雷达接入12v电源,网口接入到犀牛派A1任意网口,配置默认IP(可使用ifconfig 配置临时IP)。
LDS-50C-E 与犀牛派A1之间使用标准以太网接口连接网线。为了保证雷达能够和犀牛派A1正常通讯,需要保证二者在同一个网段。 雷达出厂设置如下:
雷达 IP:192.168.158.98
雷达子网掩码:255.255.255.0
雷达网关:192.168.158.1
雷达默认上传地址:192.168.158.15
犀牛派网络设置如下:
网口 IP:192.168.158.15
网口子网掩码:255.255.255.0
网口网关:192.168.158.1
网线连接并配置好IP后,请通过Ping命令检查是否网络已接通。
11.6.3 获取并构建蓝海ROS2驱动包
通过vnc工具,打开Ubuntu desktop后,依次执行如下命令:
- 从github获取蓝海ROS2驱动程序,并部署到对应位置
shell
sudo su //密码: aidlux
mkdir bluesea2
cd bluesea2
git clone https://github.com/BlueSeaLidar/bluesea-ros2.git src- 安装依赖
shell
sudo apt update
sudo apt install -y python3-colcon-common-extensions- 构建
shell
colcon build- 更新当前ROS2包环境
shell
source ./install/setup.sh- 使用ROS2 launch运行驱动
shell
ros2 launch bluesea2 udp_lidar.launch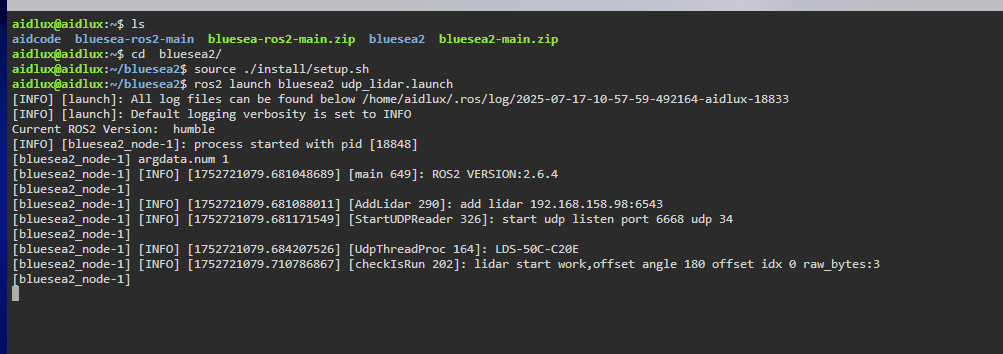
测试
通过vnc工具,打开Ubuntu desktop后,依次执行如下命令:
- 数据验证:扫描是否正常输出
shell
ros2 topic echo /scan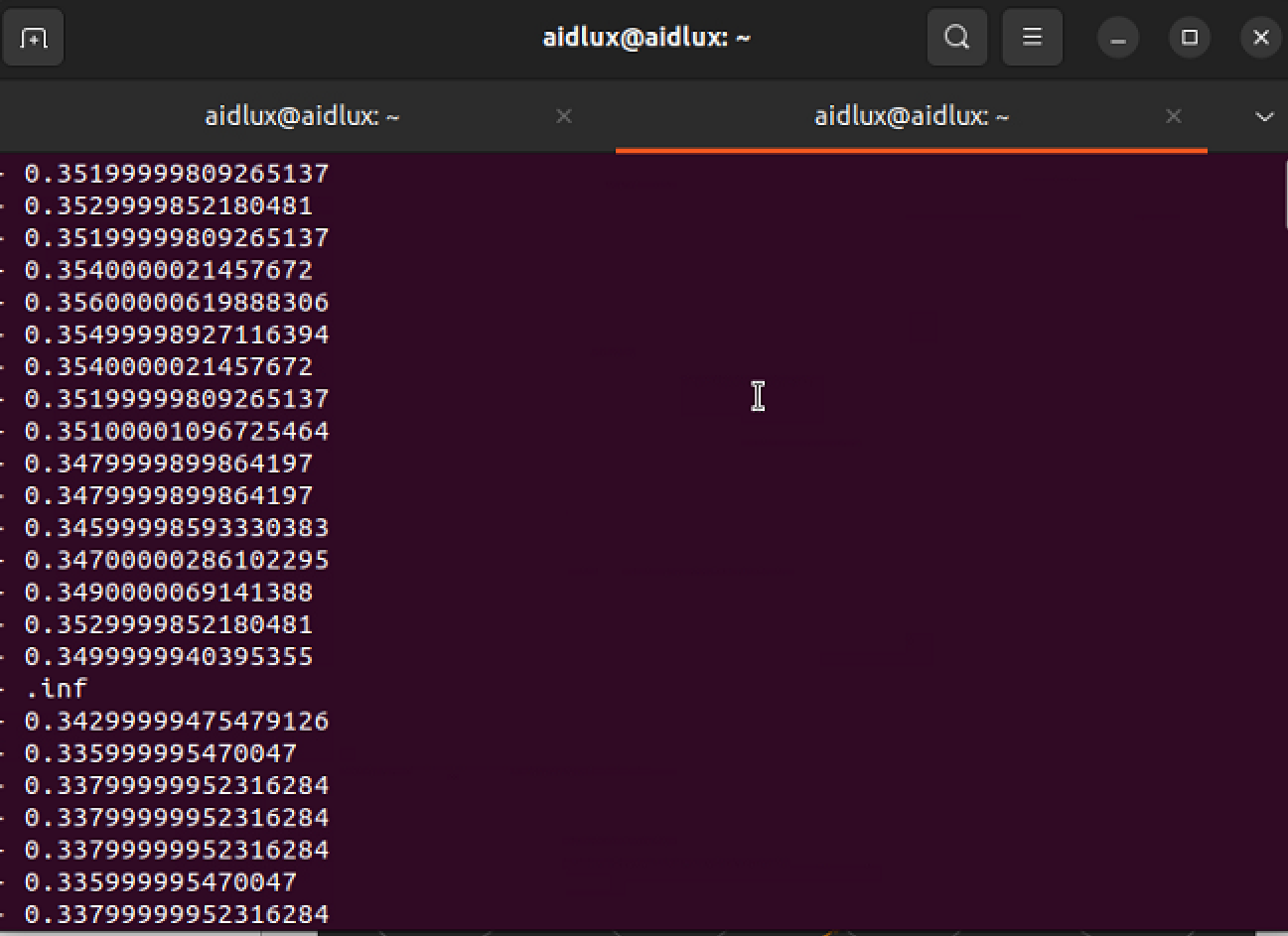
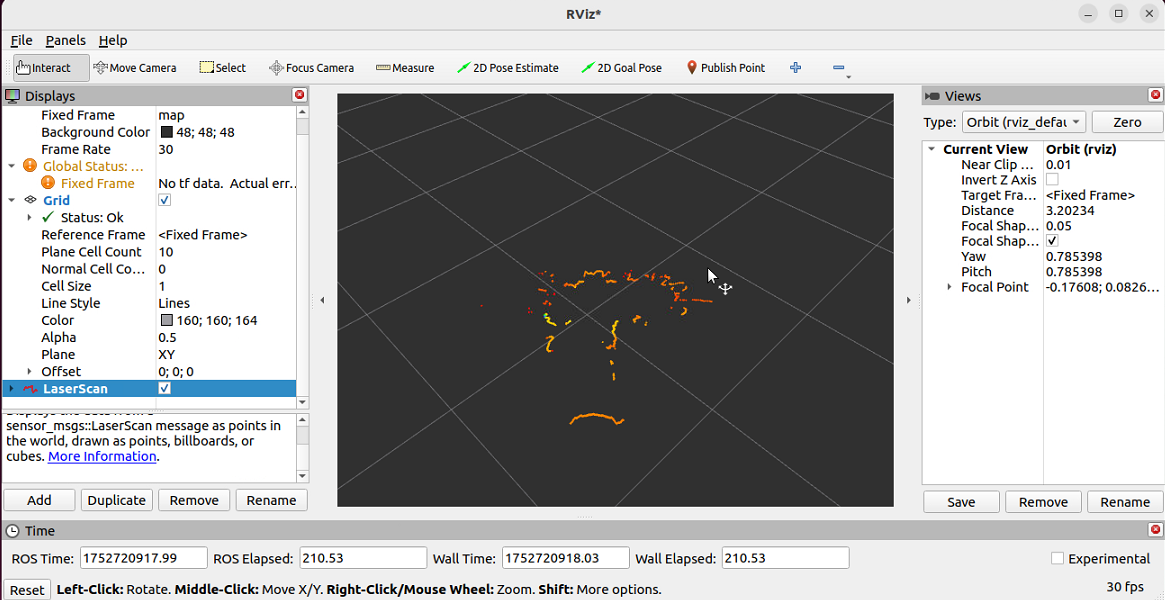
- 打开可视化工具rviz2
shell
rviz2- 打开后依次点击如下按钮,打开可视化界面 LDS50C-keshihua.png