深度相机
提醒
如下设备测试是在ROS2环境上做验证,请参考 工具安装 章节文档将所有ROS相关工具安装上。
Intel RealSense D415
准备
- 犀牛派A1
- Intel RealSense D415 深度相机及安装驱动
安装方法如下: 在安装完ubuntu desktop并通过vnc工具连接后,可在终端窗口执行如下命令:
shell
sudo apt-get update
sudo apt-get install ros-humble-realsense2-camera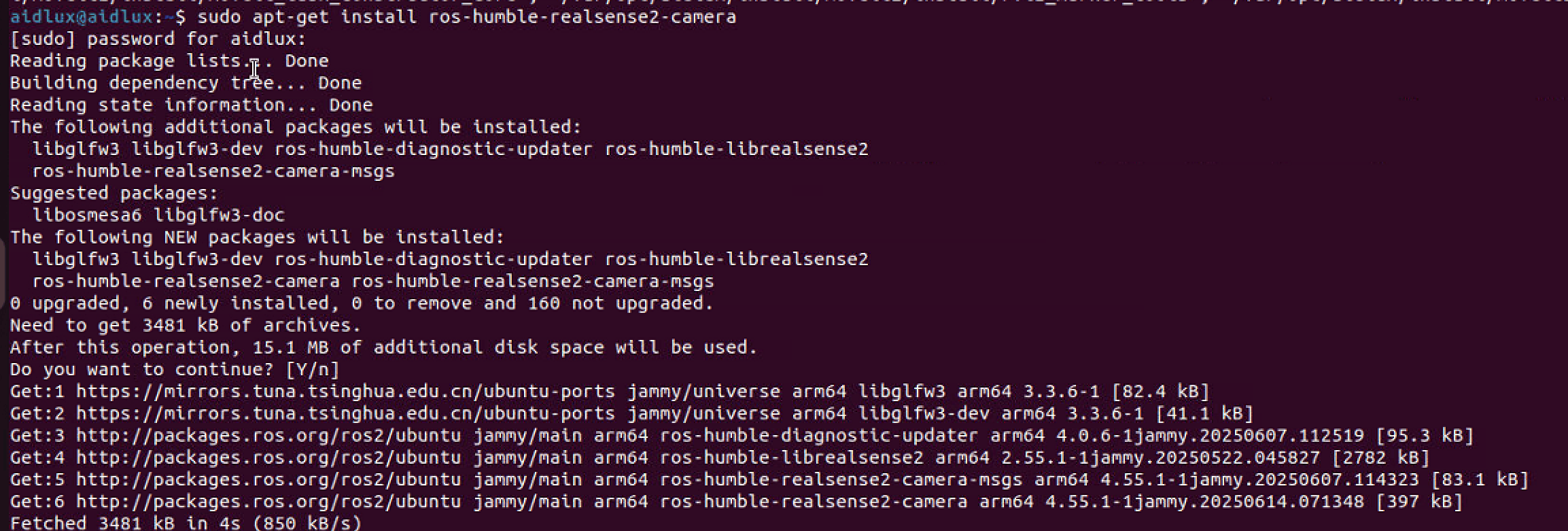
硬件连接
将深度相机连接到犀牛派的USB接口
测试
- 连接好后,通过如下命令启动相机驱动
shell
ros2 launch realsense2_camera rs_launch.py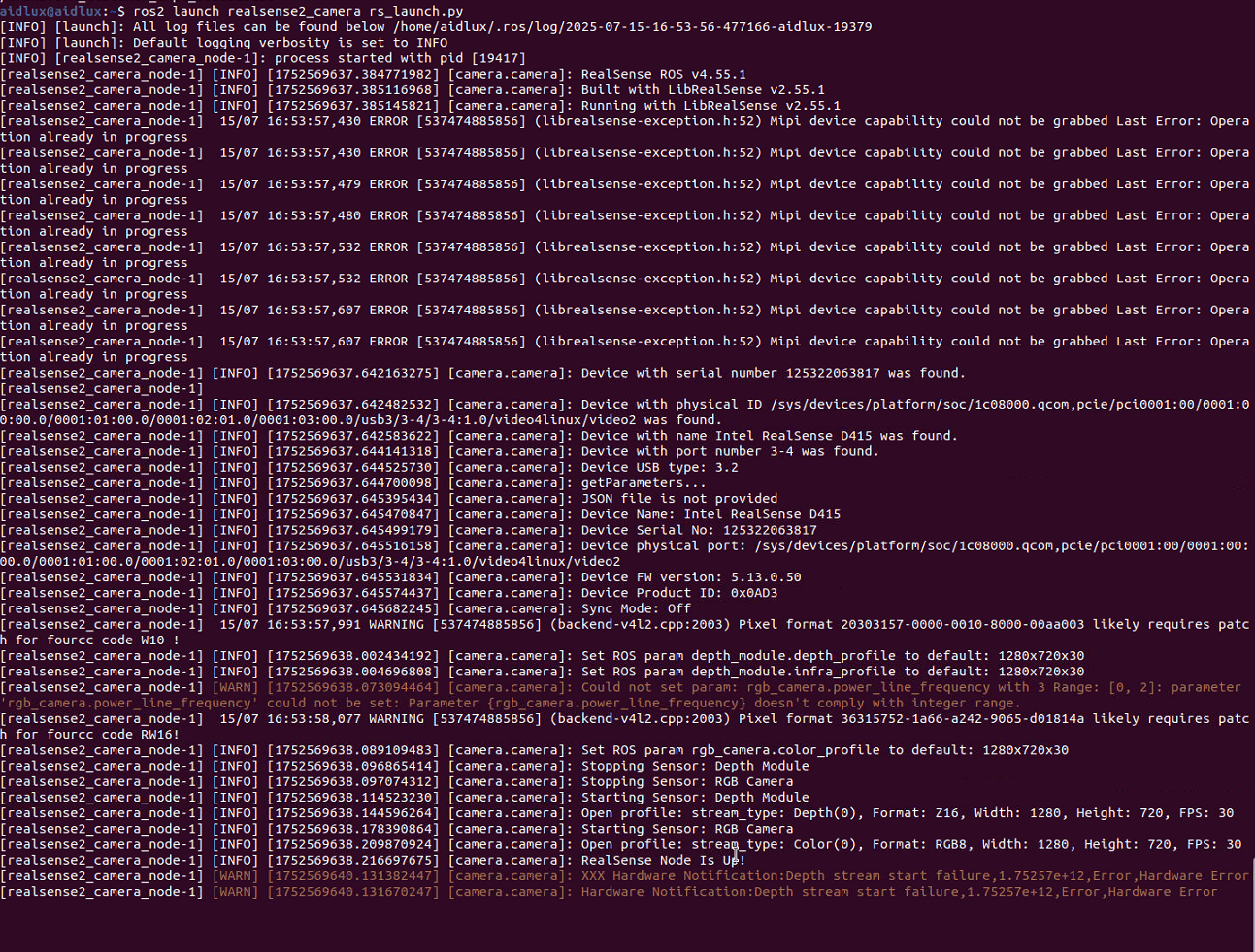
- 打开rviz2 打开终端并输入:rviz2
shell
rviz2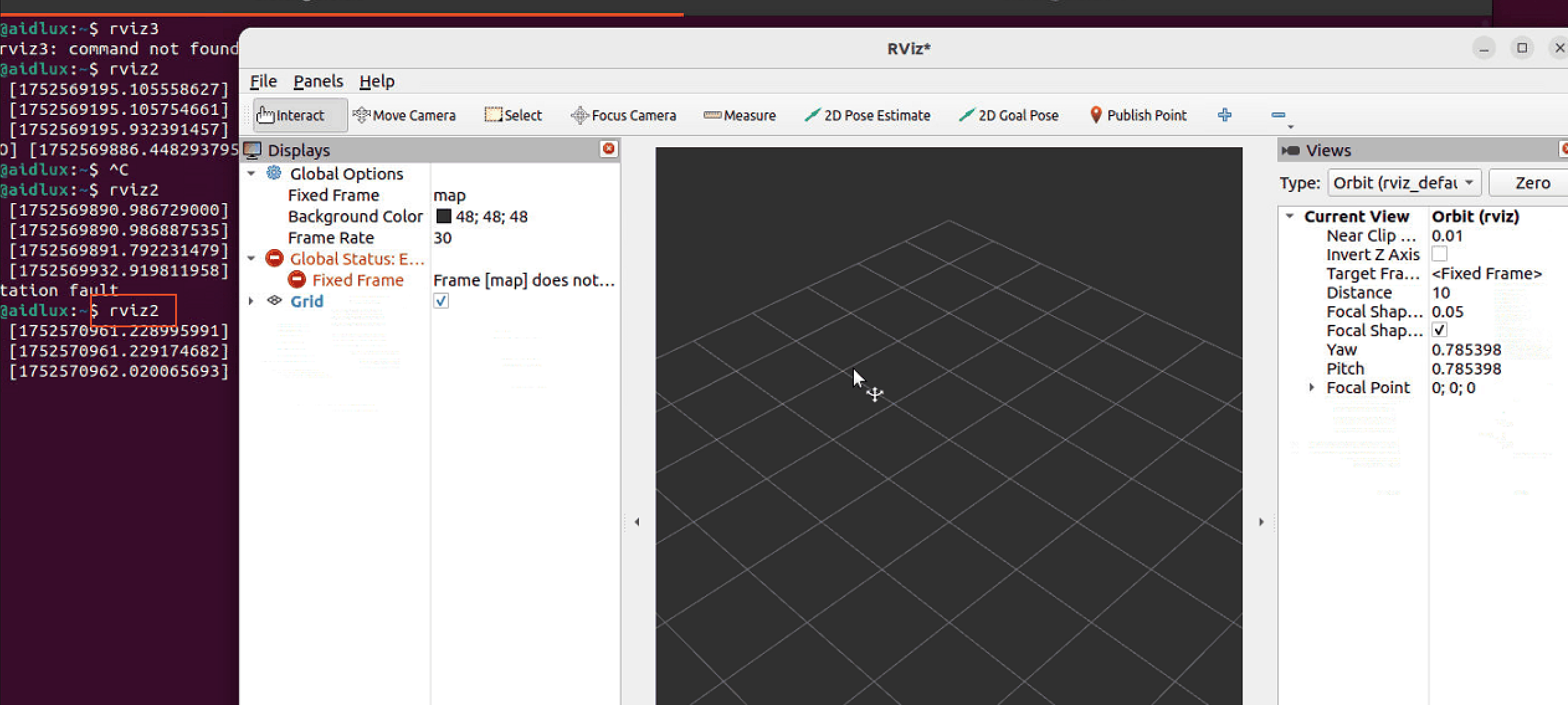
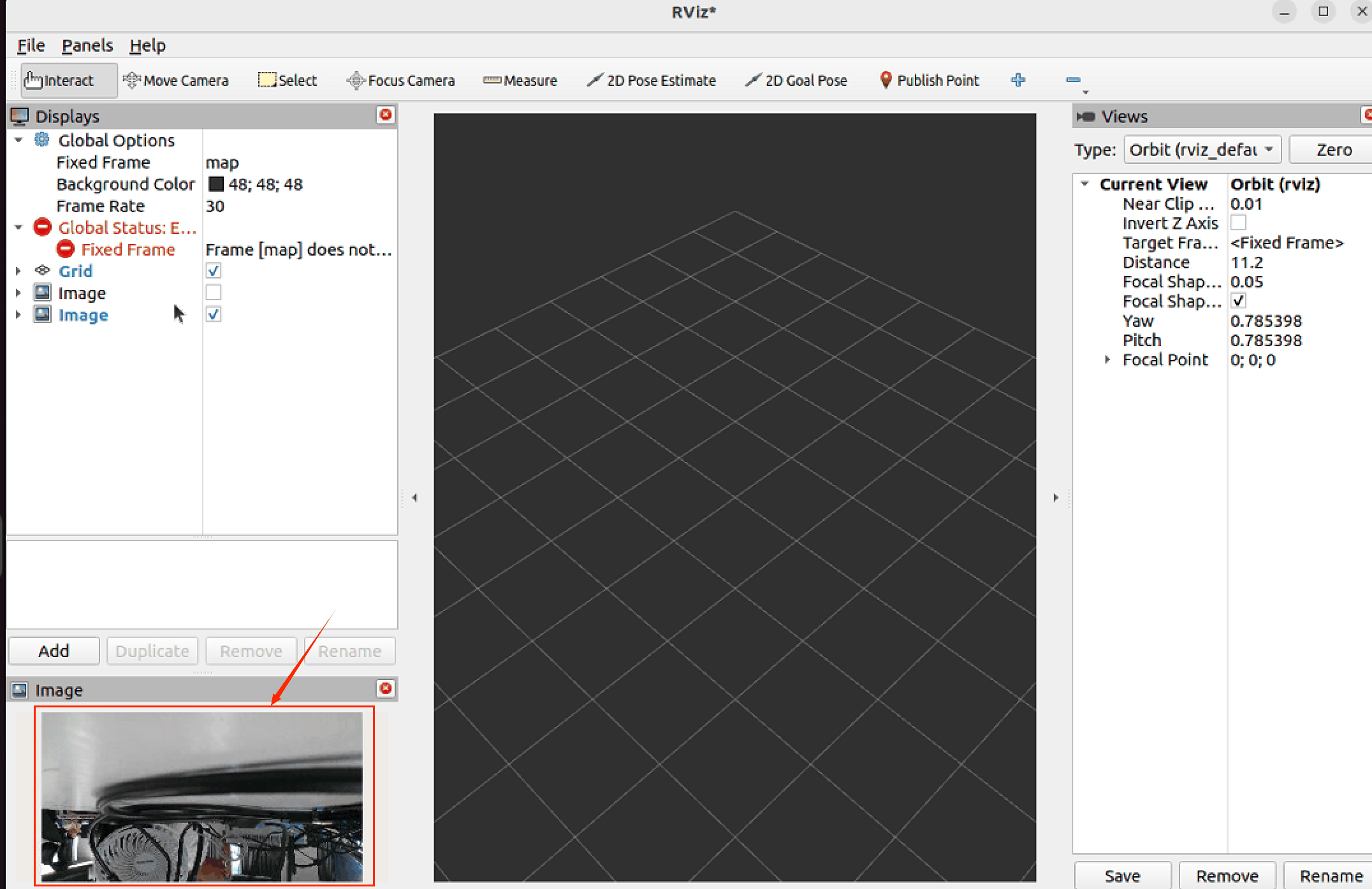
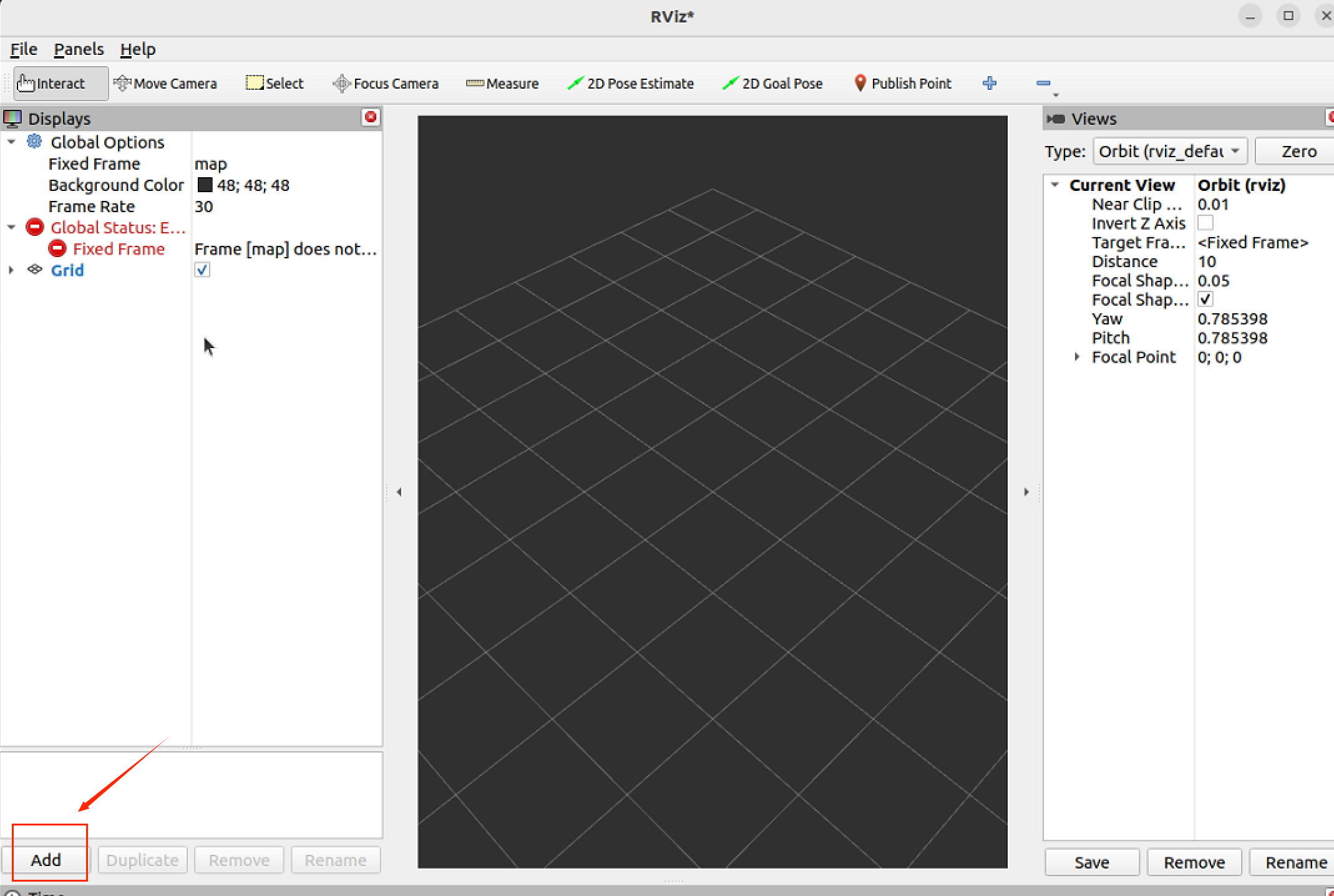
- 在rviz2中验证打开深度相机图像画面
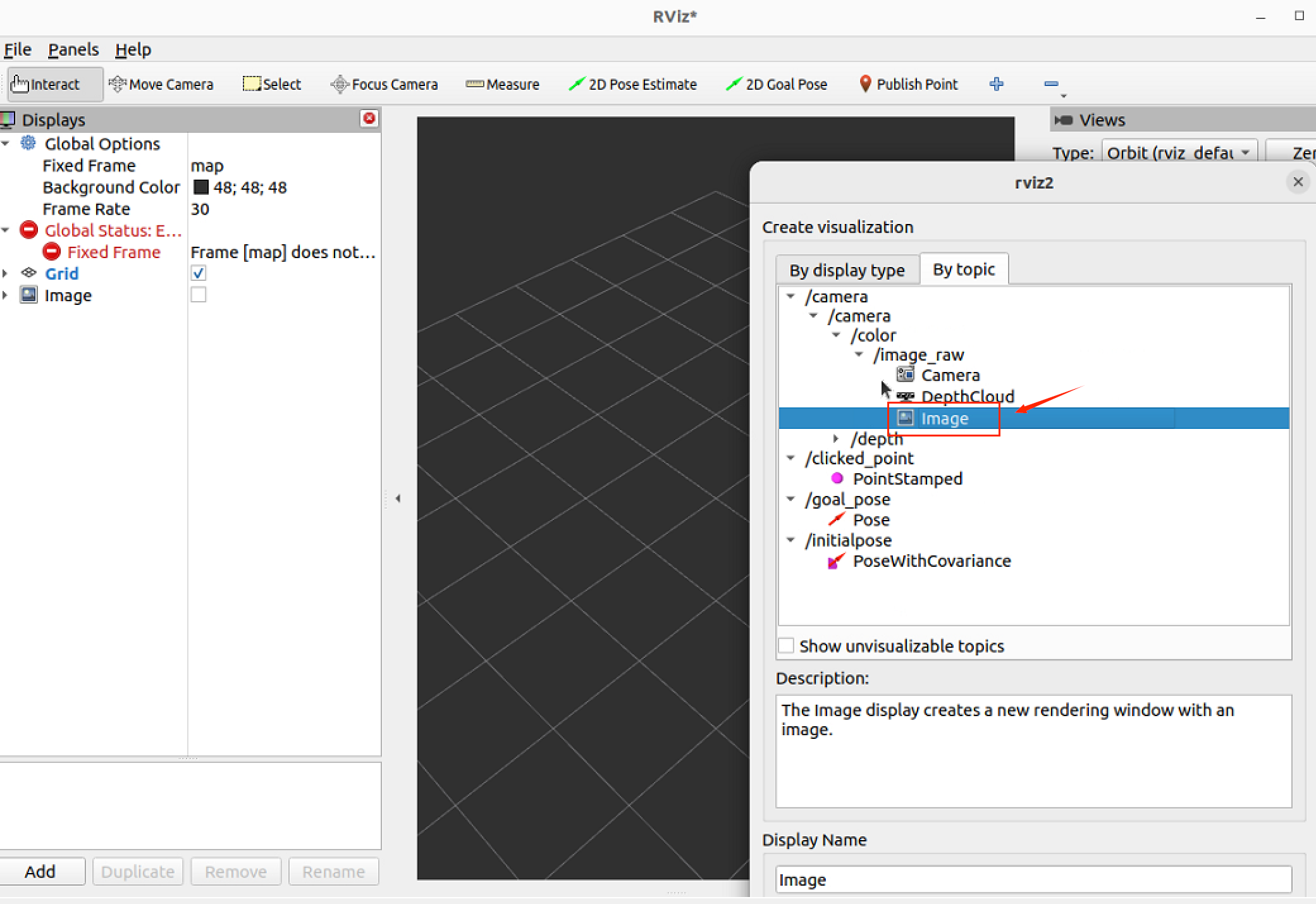
点击左下角Add按钮
在弹框中点击By topic
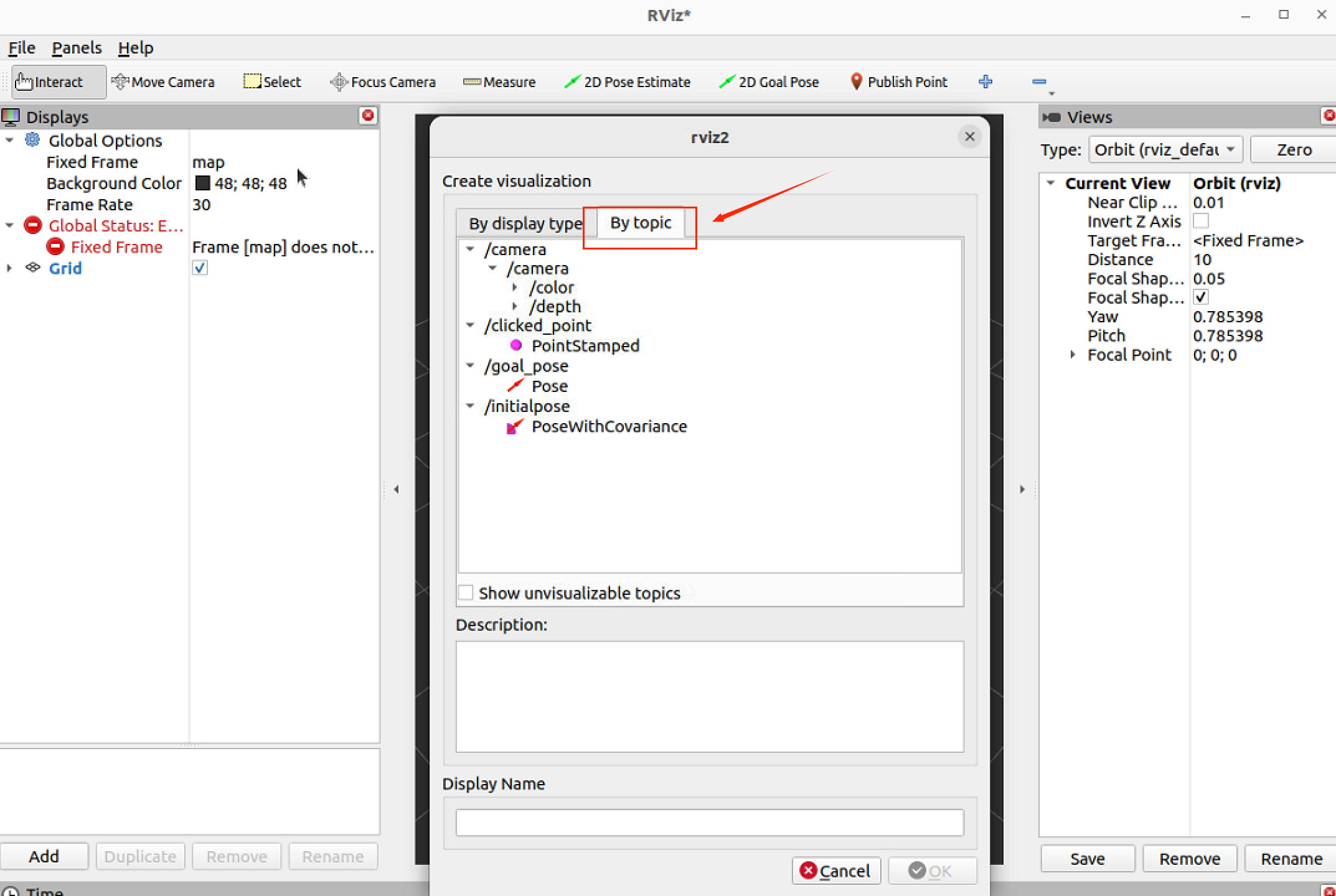
双击打开/camera节点下的image,观察到左下角的image弹框出现相机拍摄的画面