Moveit2 安装
MoveIt 2 是在 ROS 2 (Robot Operating System 2) 平台上应用最广泛的、用于移动机器人(特别是机械臂)进行运动规划 (Motion Planning)、 操作控制 (Manipulation)、三维感知 (3D Perception) 和运动学计算 (Kinematics) 的开源软件框架。
安装
- 参考快速上手 - 系统使用 -- Web 登录章节,登录到设备Web桌面
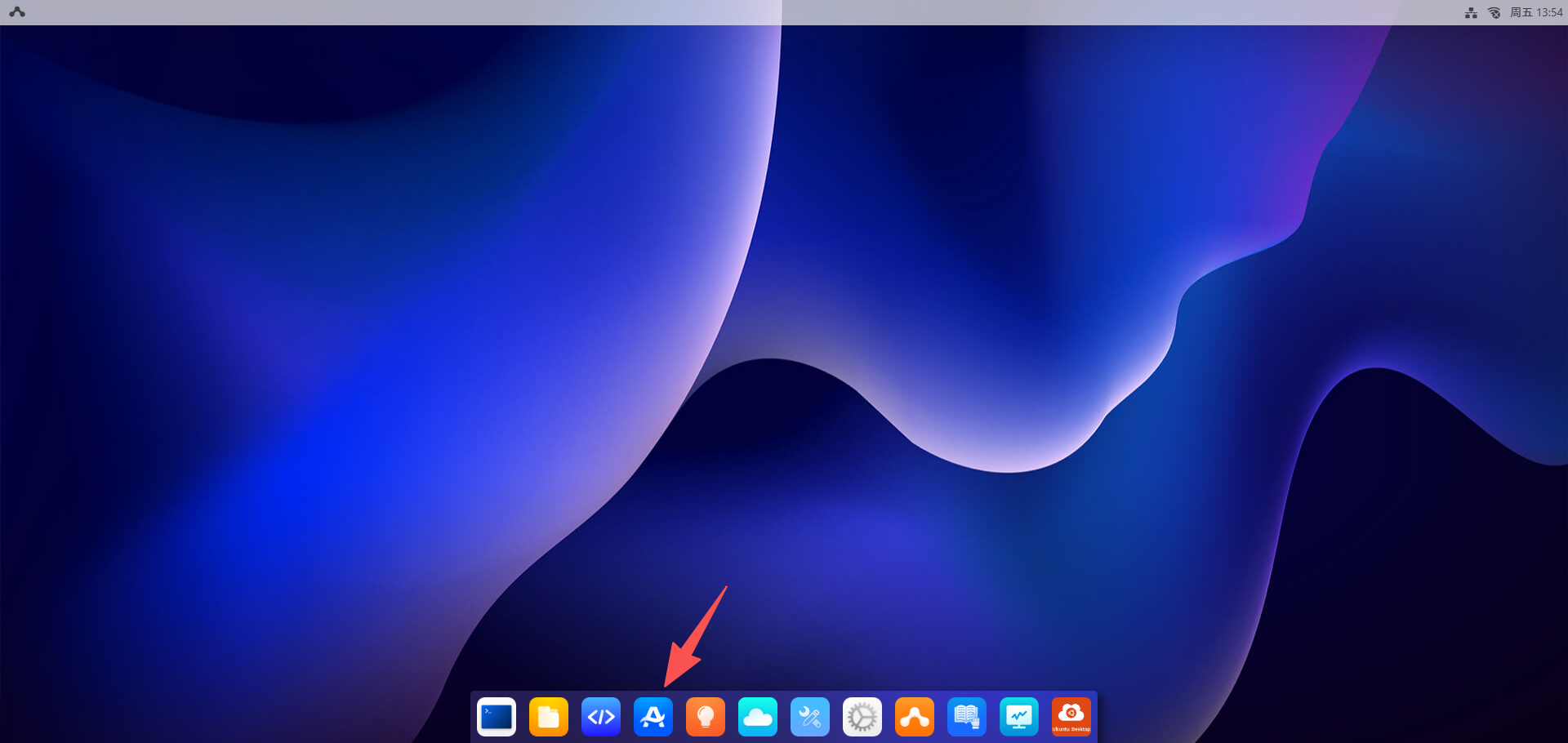
- 点击
应用中心按钮,选择机器人
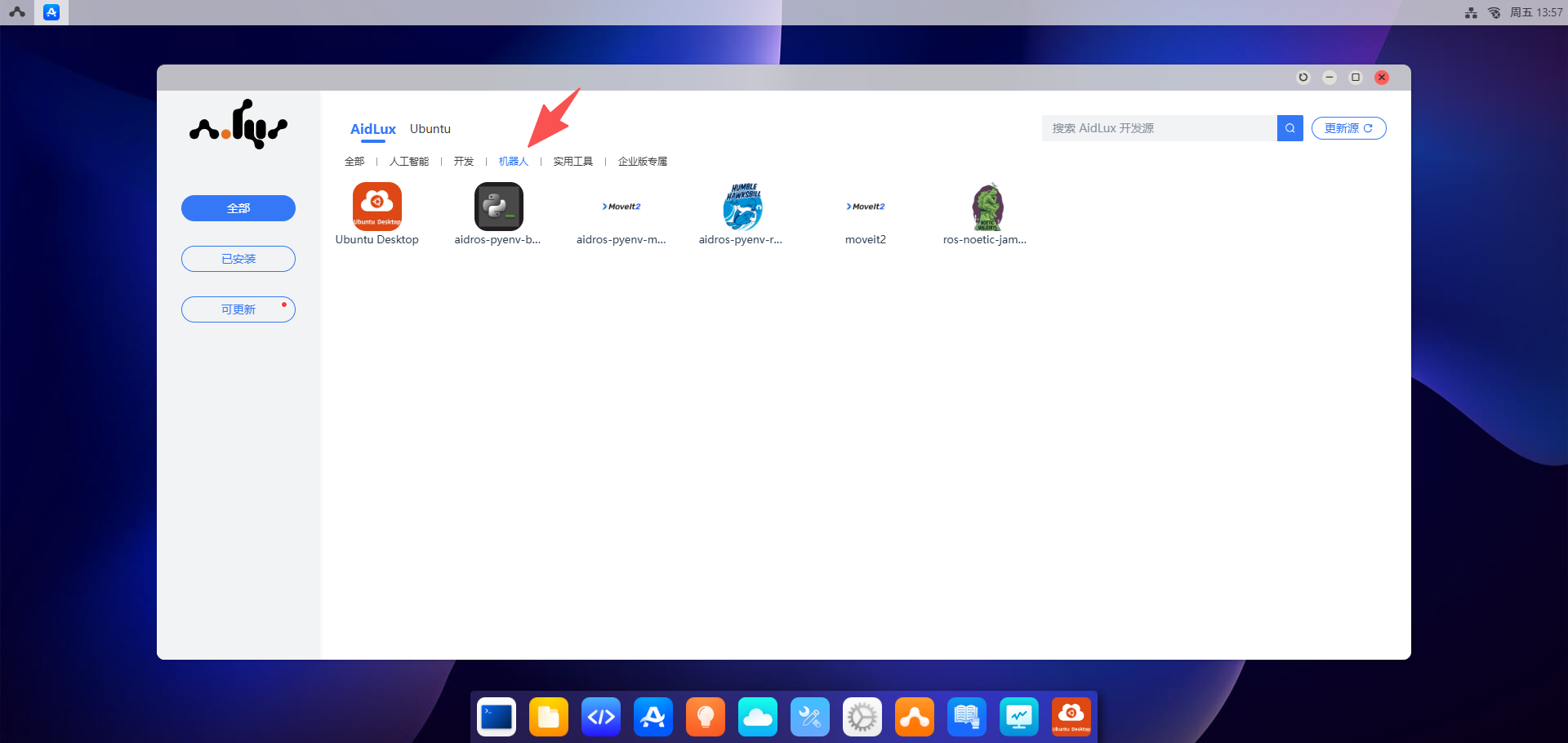
- 安装 "aidros-pyenv-moveit2"
- 点击
aidros-pyenv-bootstrap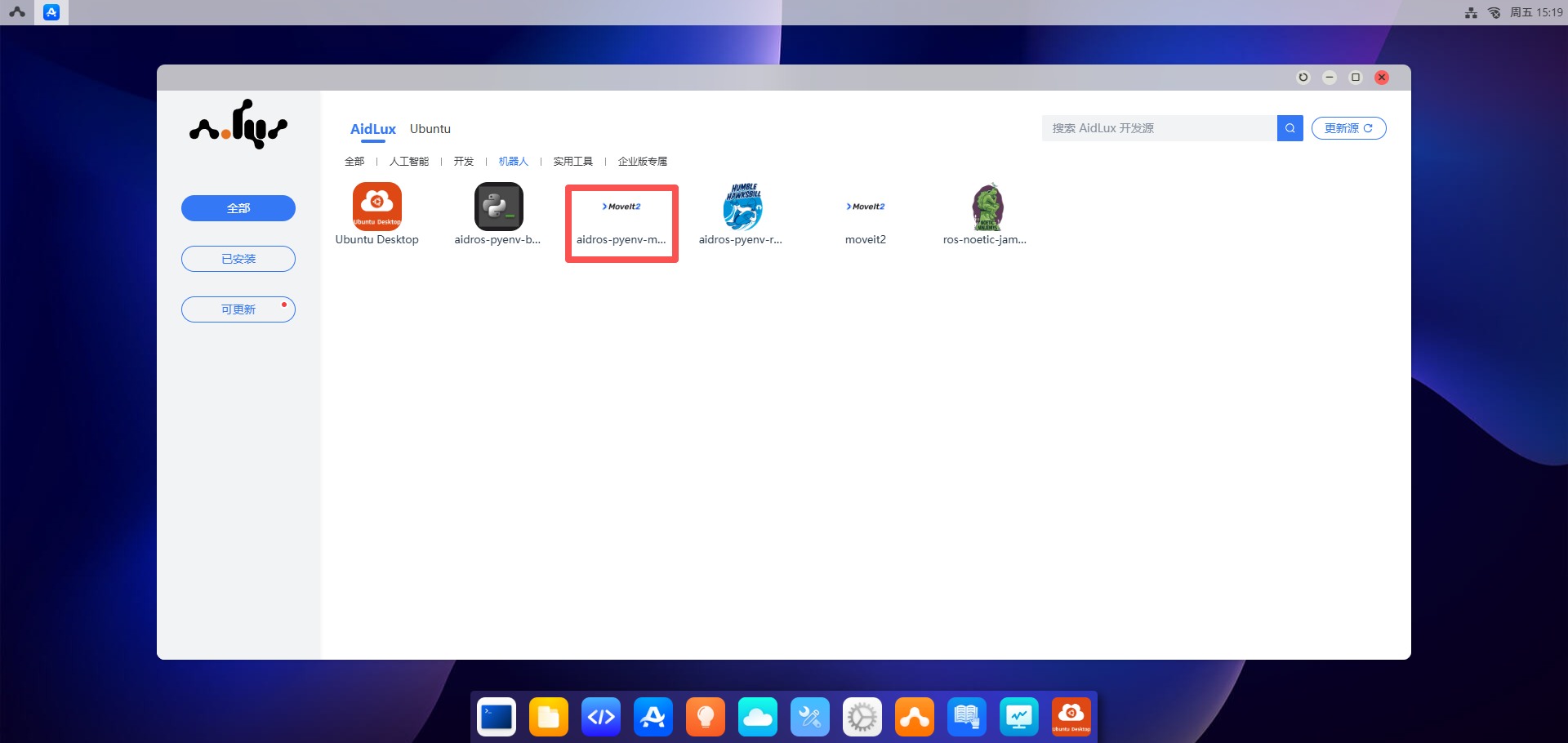
- 点击
安装按钮,输入密码:"aidlux"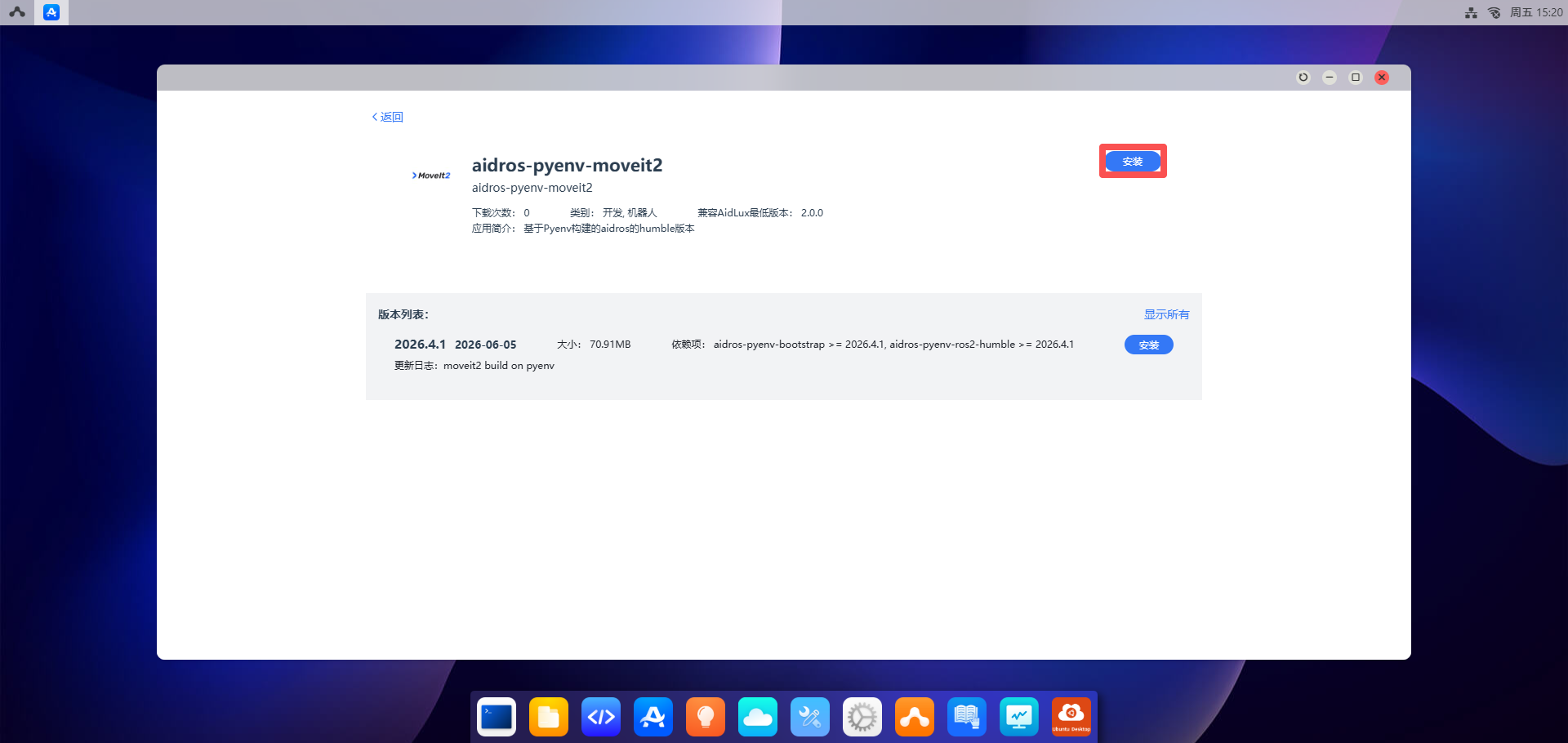
- 点击
验证
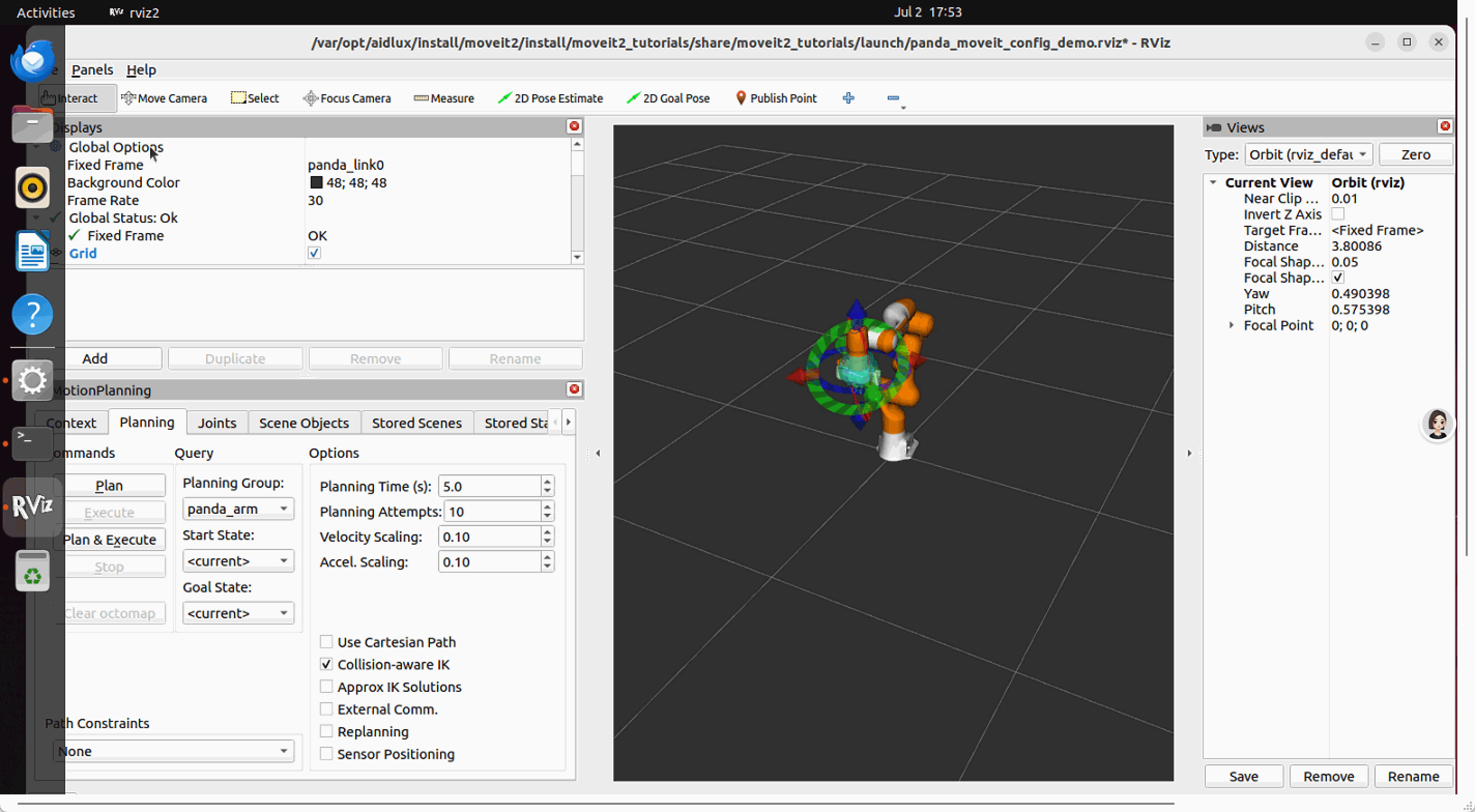
安装完 Moveit2 后,可通过如下方法进行验证是否安装成功。
通过登录到 Ubuntu Desktop 桌面。远程桌面使用请参考 远程桌面使用
打开 Terminal 窗口,执行命令:
source /opt/ros/humble/setup.bash,初始化系统资源打开 Terminal 窗口,执行命令:
ros2 launch moveit_resources_panda_moveit_config demo.launch.py,在弹出的 rviz 中可以移动机械臂